野獸陀螺儀一直是無平衡翼遙控直昇機不錯的選擇,穩定性以及操控性都不錯。在過去透過功能鍵及燈號的顯示,不用接電腦就能簡單快速的設定。
在之前有推出手機 APP 搭配藍芽界面進行設定,非常方便,但使用者界面只有英文。而現在 APP 也支援了簡體中文界面,相對在使用容易度以及方便性都大大提昇不少。此篇就來分享以下二個主題:
1. 野獸昇級
2. 野獸基本調機程序

此次的主角,是邁入第 14 年的 亞拓 450 Pro。這架亞拓 450 Pro,入手後進行了的昇級改裝,可以參考此篇拙作。接下來,先把野獸藍芽模組接上,再準備配對進行昇級與基本調機。
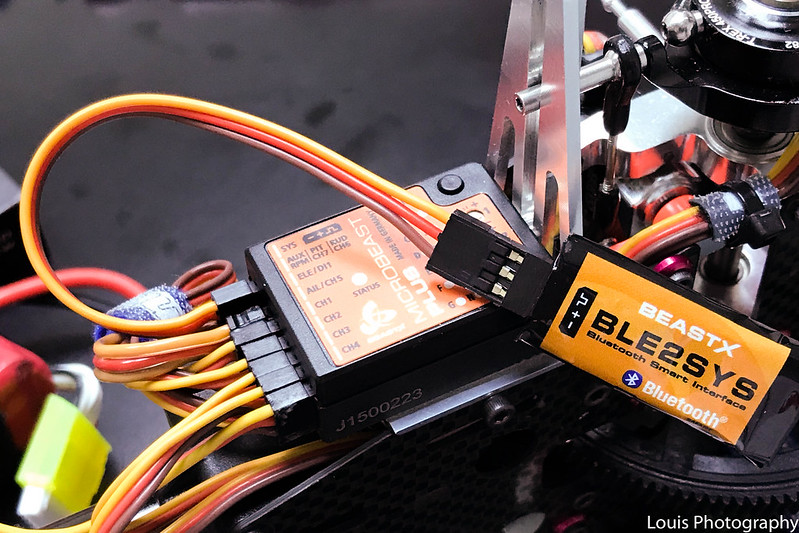
在 BEC 送電後,首先按下重新掃瞄,理應會找到名稱為 BLE2SYS 的野獸藍芽裝置。如無法找到,建議 BEC 再重新送電後,馬上再重新掃瞄。找到 BLE2SYS 後,再按下與設備連接按鈕後,會把野獸相關設定傳送至 APP。
註: 在圖上用滑鼠點一下,可顯示較大尺寸畫面。

接著按下右上角的 Option 按鈕,可進到此畫面。在這裡可以選擇簡體中文語系,這樣在操作容易度上可大大簡化難度。

回到首頁,會顯示現在野獸的版本,如下圖目前版本為 5.1.3。選擇韌體更新功能,這時 APP 會要求你登入野獸帳號。如果沒有帳號,則按下方新增帳號按鈕,建立一個新的帳號後再登入。

登入野獸帳號後,會顯示目前韌體可昇級的版本。看你是何種付費版本或免費的版本。如下方顯示目前免費版本可昇級至 5.9.9。這時按下載鈕,進行新版韌體下載。
下載完成時,下圖右方 APP 畫面原本是下載按鈕,會變成快閃儲存設備按鈕,表示可以進行新版韌體刷新了。

這時按下開始按鈕 (下圖左方), APP 會開始如下圖右方有一個進度指示,到 100% 時,表示新版 5.9.9 已刷新完成。

新版韌體刷新完成回到首頁後,首頁會顯示目前的版本已更新至 5.9.9。接下來選擇控制設定功能,進行接收種類的選擇及接收通道對應設定。
這時畫面如下方圖片中間所示,按下接收器,順利的話理應可以自動偵測到接收的類型,以及與遙控器通道的對應。如果偵測不到,或者是通道對應有錯,再進行手動調整。在這裡 450 Pro 是使用 JR XBUS Mode B 接收,自動偵測也順利成功,沒有錯誤。
接著是設定失控保護,也就是萬一有狀況,油門要收到多低,這部分就要參考機子所使用的電變在斷電或假停訊號區的位準,把遙控器油門拉到 0 或假停區,再按下下圖右方的進行中按鈕,就會以現在遙控器的油門訊號位準,做為機子失控時的保護位準。

接下來進行機子的基本調機設定,首先是
野獸安裝方向選擇 (功能A)
按照野獸在直升機上安置的方向來選擇對應的位置。選擇時點選位置圖示下方的左右二個方向鍵,而中間的圖示會相對應的改變。如選擇好了之後,請按右上角右鍵按鈕進到下一步。

CCPM舵機工作頻率選擇 (功能B)
在這裡按照你使用的CCPM舵機,選擇合適的工作頻率。
尾舵伺服器中立點寛窄頻頻率設定 (功能C)
在這裡按照你使用的尾舵伺服器,選擇合適的中立點頻率。一般寛頻選 1520us,而窄頻則選 760us。

尾伺服器工作頻率設定 (功能D)
在這裡按照你使用的尾舵伺服器,選擇合適的工作頻率。
尾舵方向設定 (功能 F)
機械部分
這時打遙控器尾舵的左右,再觀察尾軸滑套的方向,看滑套的方向是否正確?原則上,大部分直昇機如亞拓的滑套方向,由機尾往機首方向看過去,理應跟打舵方向相反。也就是遙控器打右舵時,滑套應向左;遙控器打左舵時,滑套應向右。如滑套方向不對,這時遙控器的尾舵通道請設定反向。
野獸部分 (尾舵補償方向設定)
在確認機械部分方向正確後,接下來再確認當遙控器尾舵打右舵時,在 APP 下圖右方的方向顯示如跟實際打舵方向相反,例如打右舵時 APP 顯示左,反之亦然。這時 APP 設定應要方向反向。
尾舵行程量設定 (功能 E)
在進行尾滑套行程量中立點前,請先確認。
A、尾舵臂在中立點是否垂直?
B、尾舵臂球頭孔位是否合宜?
C、尾拉桿長度是否合宜?讓尾滑套在中立點時,尾旋翼有 2-3 度右螺距,也就是尾槳對折後,尾槳尾端在 450/500 級有 4mm 的距離;在 550-700 級有 10mm 距離。
在機械沒有干涉為前提,儘量加大尾舵行程量。

十字盤混控型式設定 (功能G)
在這裡按照直昇機十字盤的類型,選擇合宜的設定。
十字盤伺服器工作方向設定 (功能H)
確認遙控器在推拉集體螺距時,十字盤的工作方向要跟實際打舵的方向一致。

十字盤混控方向設定 (功能I)
遙控器進行升降、副翼打舵的動作,這時檢查升降、副翼打舵的方向跟 APP 顯示是否一致? 如果升降或副翼其中一軸向顯示跟實際打舵方向不一致時,就要各別設定反向。
十字盤伺服器中立點微調 (功能J)
在這裡要根據直昇機的機械結構進行三平或四平的調整。
1. 舵臂中立點水平
2. 十字盤水平
3. 集體螺距0度
4. 部分機型會有第四平,如相位臂水平。
而在調整集體螺距時,這時就要拿出世界冠軍 (Kenny Ko) 研發推薦的螺距規來進行調機。它在偵測螺距的精準度到小數以下第二位,而穩定度也相當不錯,不會來回打舵時,基準點一直在改變。而且它內建鋰電池,採 Type-C 方式充電,在充電方式也相當方便。

可搭配十字盤配平器來配平十字盤。
利用下圖右方對應三個十字盤舵機的 + - 按鈕來微調舵臂,在中立點時,舵臂保持水平。接下來調整三支CCPM拉桿,也可搭配十字盤配平器來配平十字盤。最後再調整螺距拉桿,調整集體螺距為零度。

定義循環螺距六度位置 (功能K)
先把主槳轉至跟機身平行,這時按下測量鈕,接著按 + - 按鈕或轉動旋鈕調整至循環螺距為六度。

設定集體螺距行程量 (功能L)
在這裡是調整集體螺距,最大及最小集體螺距可以分開調整。首先再確認遙控器油門推正螺距時,而 APP 卻是顯示負螺距方向,則要在下圖右方 APP 的螺距方向做反向設定。
在確認遙控器推正螺距,APP 顯示集體螺距也是增加後,開始調整集體螺距的最大及最小值。先把控推到最大正集體螺距,再按 + - 鈕,調整至適合機型或個人飛行習慣的螺距角度,在這裡配合 450 Pro 是調整至 12 度。可以看到 Kenny Ko 螺距規的左方有一個往上的三角形箭頭,代表這是正螺距方向。

調完最大正集體螺距後,把控拉回到最大負集體螺距的位置,再按 + - 鈕,調整至適合機型或個人飛行習慣的螺距角度,在這裡配合 450 Pro 是調整至負 12 度。可以看到 Kenny Ko 螺距規的左方有一個往下的三角形箭頭,代表這是負螺距方向。

循環螺距六度定義及集體螺距行程量在 APP 的設定畫面。

十字盤最大傾斜範圍設定 (功能M)
十字盤最大傾斜範圍 (E-RING),這對調機而言是很重要的步驟。分別在最大及最小集體螺距的位置,同時推升降及副翼到底。再按+- 按鈕調整循環環的限制邊界值,直到沒有機械干涉為止。
到這裡基本調機動作算是完成了,這時按下方的跳出 Wizard 按鈕,來離開基本調機精靈。

沒有留言:
張貼留言