
一、在調整尾舵感度時, 建議先取消定速功能.因為有時定速亦會造成金魚尾的假象而誤判問題之所在. 在進行VBar尾舵調校前,先確認下列事項.
1.確定尾橫軸的滑順度.尾軸滑套是否滑順?拆下尾舵拉桿頭,滑套在全行程上來回走,是否有不順的點, 大部分狀況是右旋,也就是尾軸滑套往尾波箱方向(內側) 較有機會不順.如有,把尾旋翼拆下,用棉布包住尾橫軸。這時用手轉主旋翼30秒,應可把橫軸清乾淨。
2.確定尾舵中立點調校時有2-3度的右自旋尾螺距, 但VBar尾舵左右邊界值是否相等則要看機子的機械結構.因為VBar是針對 Mikado機子設計, 在部分的它牌機子上左右行程未必能完全相等. 在調中立點時應以有2-3度的右自旋尾螺距為第一優先.
當你選好工作頻率後,把尾伺服接上去.並進行尾舵左右邊界調整.如果尾舵的機械中立點正確,左右的行程邊界值應一樣.如差異過大,則要再調整舵片或尾伺服拉桿.另外如值大於120則表示拉桿在舵片上的孔位太短,而小於80則表示拉桿在舵片上的孔位太長.所以值要在80-120之間,並且接近或相等為最佳狀況.

二、 V-Bar 尾部旋轉翼調校
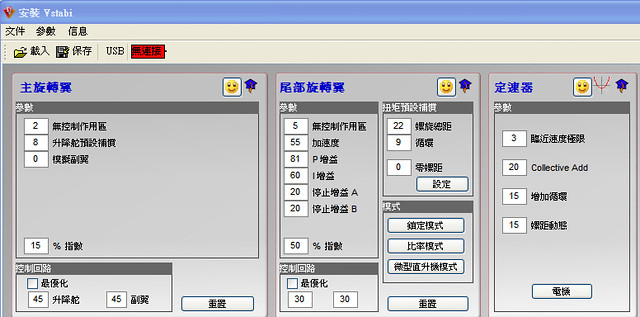
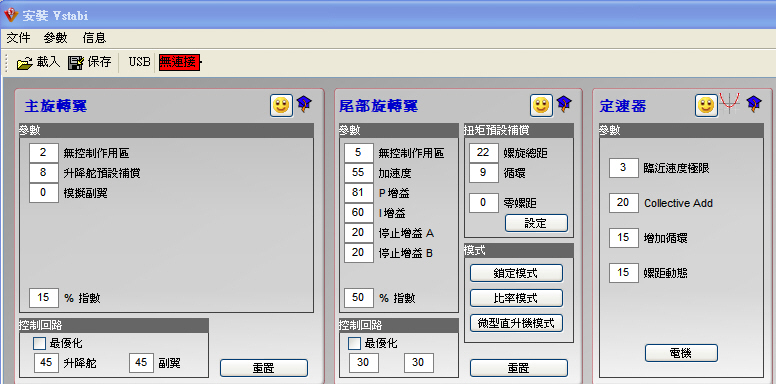
如果您確認尾旋翼總成在機械結構上沒有問題, 並且在 VBar 尾舵行程調校也合乎 VBar的要求. 以下要進行的 VBar 尾舵調校才有意義.在VBar的尾部旋轉翼的專家模式.其預設值為 P 增益 80, I 增益 60,而尾陀螺增益則視機體大小有不同的值. 如 700 級約在90-100, 450級約在60-65左右.基本上大部分的直昇機使用原預設值只要調尾部旋轉翼的陀螺增益即可以有很好的效果.而以下則是更細部的調整.
首先進行下列測試動作.
1.順、逆、側風停懸.
2.左右側移
3.高速左右航道
4.高速左右航道急彎
5.前、後滾翻.
6.高速前進航道加慢速自旋
如果有快速擺尾或高頻音, 則應降低尾陀螺增益.尾陀螺增益調整視你的控制方式,是由控或由VBar 通道來控制.
快速的抖動
如果幅度小且快速的抖動, 如每秒多於三次以上的抖動.那表示P增益太高.建議以一次五單位調降,最低不建議低於60.如果低於60仍沒有改善,應回到第一點,檢查機械結構,伺服行程等.如有改善了.則再做一次下方第五點的尾旋翼控制回路最優化調校。
慢速的小幅抖動
過高的 I增益會造成尾部旋轉翼小幅的抖動.大約每秒1-2次.如有此問題,則以每次5單位調降 I增益,最低不建議低過40.
另外, I 增益是跟扭矩預設補償是成反比的,所以如果 I 增益提高了,扭矩預設補償就要降低,反之則要調高.而如果 I 增益降到40仍然無法解決問題,應回頭再檢查第一點,看是否尾伺服舵臂孔位太內側.以及機械結構等問題.如有改善了.則再做一次下方第五點的尾旋翼控制回路最優化調校。
三、尾舵對集體螺距補償調整
進行正螺距拉昇動作.並且注意在拉昇過程中機體是否依然保持水平.如果尾舵在拉昇過程中或在正負螺距轉換時,尾旋翼會略為右偏再回來.這時就要調高下方畫面中"尾部旋轉翼/扭矩預設補償/螺旋總距" ,一次以3單位為基準.反之如略為左邊再回來則表示補償過多,而要降低設定值。
四、尾舵煞車力道調整
在原地快速順時針/逆時針自旋數圈再急煞停, 查看煞停的力道是否足夠或太大. 在Pro尾舵設定裡,停止增益A,B跟控制回路裡的左右數值的意義.以下都以主旋翼是順時針旋轉的直昇機為主.
停止增益A: 是指遙控器尾舵搖桿由右回到中立點的煞車力度.
停止增益B: 是指遙控器尾舵搖桿由左回到中立點的煞車力度.
五、.尾旋翼控制回路最優化
電腦準備動作
一樣進入VBar設定電腦畫面並接上VBar. 在尾部旋轉翼裡的專家選項中的左下角,把控制回路”最優化”選項打勾.以主旋翼為順時針旋轉的直昇機來說.控制回路左方數值是控制逆時針旋轉速度,也就是尾舵往左打;右邊數值則是控制順時針旋轉速度,也就是尾舵往右打.原來預設值是30 30.
控制回路裡左方數值代表遙控器尾舵搖桿由中立點向左再回中立點的行程反應速度.
控制回路裡右方數值代表遙控器尾舵搖桿由中立點向右再回中立點的行程反應速度.
數值愈大,小量的搖桿行程就有愈大的反應.
進行尾旋翼控制回路最優化自動微調
以我自己的實作為例.昇空後,定點尾舵左右打到底自旋幾次.每次自旋約3-4圈再換邊.來回二至三次即可降落.這時Vbar 自動調校由原來的 30 30 變為 3828.這時再昇空試機,吼.原本是順逆時針自旋速度不一,現在已很接近.再航道試一下,左彎的反應明顯靈敏很多.而右彎則略慢.所以我在降落後.把數值調為 35 31.再昇空試機,左右自旋速度OK.而左右迴轉的手感已很接近,讚啊。
六、VBar 尾舵感度調整再簡化, 以JR XG11為例
之前的VBar尾舵感度65以上的計算公式=65+控T.Lock感度/1.67.
但也有另一個方式是, 把控的陀螺儀感度模式設為NORMAL.這樣訊號就不用切割為鎖定/非鎖定而有較大的訊號範圍可以設定.因為 VBar的鎖定/非鎖定是要從VBar(電腦)來調整,而遙控器只是給感度值而已.不同的遙控器建議可接上電腦來看實際的感度值才準.
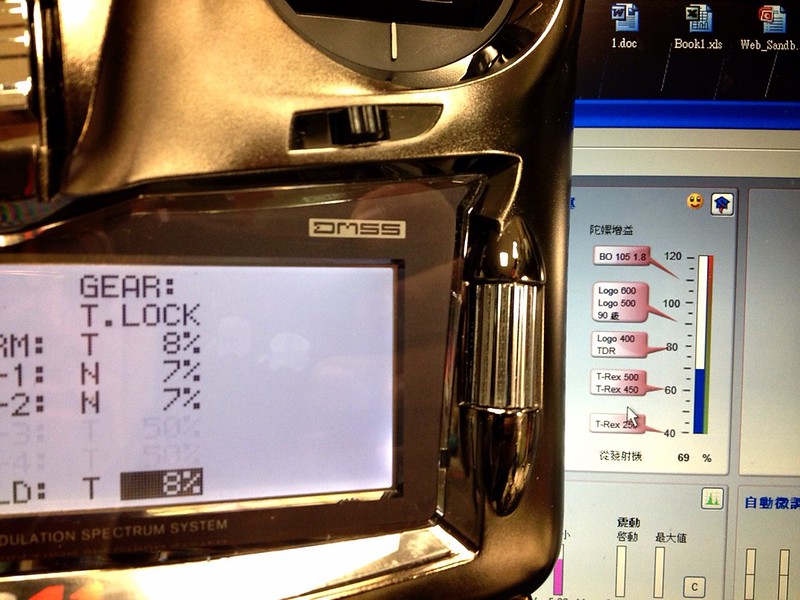
以 JR XG11 來說並不是以 1:1 計算喔. 而是 VBar 感度= NORMAL感度 x 1.3
如下圖則 54x 1.3=70

2 則留言:
你的文章,令我增益不少
謝謝讚美, 文章部分照片鏈結出問題, 近日會修正.
張貼留言