因為網路,USB接頭各種因素,而使更新/升級未成功而使Vbar 變"磚頭"怎辦? 不用著急, 請按照下列程序來操作.此程序只適用黑,藍二代VBar (大小V均適用), 銀河系列則要跟 Mikado連絡.
2012年10月19日 星期五
2012年10月18日 星期四
[直昇機][VBar] VBar 接電腦的注意事項
有關VBar 接電腦的注意事項,感謝HOBA的提點與分享。
VBar設定除了第一次設定要初始化外,也就是,(以下為 Windows 平台為例)
1、執行VBar電腦端程式。
2、VBAR接USB至電腦, 並確認電腦端上 USB燈號為綠燈。
3、開控、直昇機BEC送電。
這時 VBar 會初始化再進入設定程式.有點像電腦重新開機一樣。其他設定可以在BEC已送電狀況下插USB接電腦,設定完也可直接拔,BEC不用斷電再開。前提是 Windows 平台, VBar 設定程式要先啟用再插拔USB,而 Mac 平台則要先插 USB再執行VBar 設定程式。
初始化程序在下列情況使用,
1、在第一次設定
2、VBar開機後異常時使用,如十字盤亂跳
3、改變輔助通道使用方式後十字盤傾斜
4、其他異常未明狀況
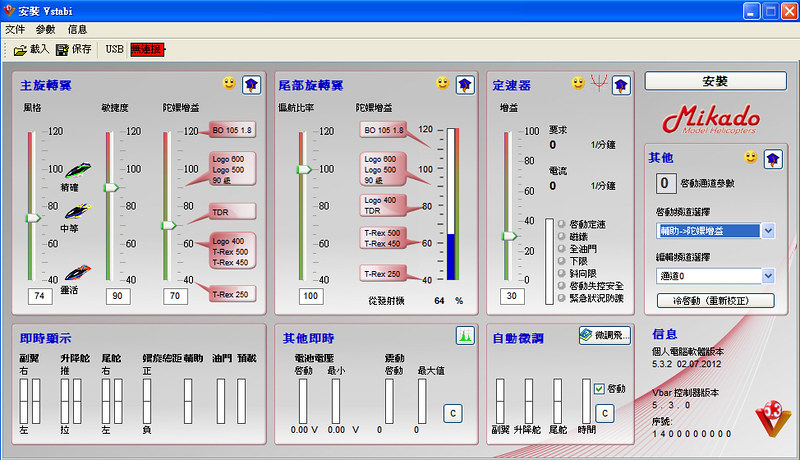
初始化程序除上述在接電後啟用外, 也可以在接上電腦後, 按下下圖右方中間在其他裡的"冷啟動(重新校正)"來執行。
VBar設定除了第一次設定要初始化外,也就是,(以下為 Windows 平台為例)
1、執行VBar電腦端程式。
2、VBAR接USB至電腦, 並確認電腦端上 USB燈號為綠燈。
3、開控、直昇機BEC送電。
這時 VBar 會初始化再進入設定程式.有點像電腦重新開機一樣。其他設定可以在BEC已送電狀況下插USB接電腦,設定完也可直接拔,BEC不用斷電再開。前提是 Windows 平台, VBar 設定程式要先啟用再插拔USB,而 Mac 平台則要先插 USB再執行VBar 設定程式。
初始化程序在下列情況使用,
1、在第一次設定
2、VBar開機後異常時使用,如十字盤亂跳
3、改變輔助通道使用方式後十字盤傾斜
4、其他異常未明狀況
初始化程序除上述在接電後啟用外, 也可以在接上電腦後, 按下下圖右方中間在其他裡的"冷啟動(重新校正)"來執行。
2012年10月17日 星期三
[直昇機][Vbar] VBar Pro 調機心得
以下是這陣子的 VBar Pro 調機心得.不過這只是個人心得,每人手感都不同, 供大家參考.
因為遙控器只是給Vbar 訊號, 再由 VBar 決定伺服要打多少.所以保持遙控器訊號的線性度再來調機是很重要的. 當你在調手感時,如果覺得機子有點飄.這時有人會認為抓不住,反而加大 EXP.但這是剛好相反.因為控的訊號給太慢,而造成機子反應慢.那種感覺不是溜。
所以建議把 VBar 內建的 EXP都取消,就是在下圖中.主旋翼跟尾舵的專家模式裡的"指數".主旋翼是15%, 尾舵是50%都設為0%. 再來用控來控制. 而 EXPRESS 這內建的EXP是無法取消的.
先把 ELEV/AILE DR/EXPO 先為 100/20,習慣了再調100/10,習慣了再調 100/0,如覺太溜 (不黏手) 是用風格去控制, 一次以10單位來調整. 而不是改變遙控器的EXP。而尾舵的遙控器 DR/EXP: 100/30-40 或 100/20。
1. 用控制回路調整左右自旋速度, 左邊調左旋, 右邊調右旋。
2. 用停止增益 AB 來調整煞車力道, 也就是遙控器尾舵由外側回到中立點時,VBar要提高多少增益來煞車.停止增益 A 是調右旋煞停, 停止增益 B 是調左旋煞停。
3. 上下大P時,如在改變正負P會跑,則提高尾舵對集體螺距的補償。
所以在儘量保持遙控器的訊號線性度前提下
1.用風格來控制"黏手度",(滑溜度)
2.用敏捷度來控制最大滾轉率
3.尾舵用控制回路來控制左右自旋速度
這樣機子會更精準, 穩中帶利. 完全在你手中. 等於"實機模擬器",每次的調整先飛一,二趟去習慣它.接著機子就跟你合為一體而完全同步,享受"人機一體"的FU
因為遙控器只是給Vbar 訊號, 再由 VBar 決定伺服要打多少.所以保持遙控器訊號的線性度再來調機是很重要的. 當你在調手感時,如果覺得機子有點飄.這時有人會認為抓不住,反而加大 EXP.但這是剛好相反.因為控的訊號給太慢,而造成機子反應慢.那種感覺不是溜。
所以建議把 VBar 內建的 EXP都取消,就是在下圖中.主旋翼跟尾舵的專家模式裡的"指數".主旋翼是15%, 尾舵是50%都設為0%. 再來用控來控制. 而 EXPRESS 這內建的EXP是無法取消的.
先把 ELEV/AILE DR/EXPO 先為 100/20,習慣了再調100/10,習慣了再調 100/0,如覺太溜 (不黏手) 是用風格去控制, 一次以10單位來調整. 而不是改變遙控器的EXP。而尾舵的遙控器 DR/EXP: 100/30-40 或 100/20。
1. 用控制回路調整左右自旋速度, 左邊調左旋, 右邊調右旋。
2. 用停止增益 AB 來調整煞車力道, 也就是遙控器尾舵由外側回到中立點時,VBar要提高多少增益來煞車.停止增益 A 是調右旋煞停, 停止增益 B 是調左旋煞停。
3. 上下大P時,如在改變正負P會跑,則提高尾舵對集體螺距的補償。
所以在儘量保持遙控器的訊號線性度前提下
1.用風格來控制"黏手度",(滑溜度)
2.用敏捷度來控制最大滾轉率
3.尾舵用控制回路來控制左右自旋速度
這樣機子會更精準, 穩中帶利. 完全在你手中. 等於"實機模擬器",每次的調整先飛一,二趟去習慣它.接著機子就跟你合為一體而完全同步,享受"人機一體"的FU
[直昇機][Vbar] VBar Pro 尾舵感度計算及尾舵對集體螺距補償

今天450 Pro V2 / mini VBar Blueline 5.3 Pro 主要是調整尾舵感度及上下大P在拉時,在+-P轉換時,尾會略跑的狀況。在升完 Pro 第一件事,就是把輔助通道的功能再切回控制尾舵感度。不然升完Pro 預設是用來切換通道,並且停在通道0的位置,你會覺得怎忽然控的感度設定失效了。

但要注意.這時你控上的感度不等於實際感度喔.以XG11為例.
VBar尾舵感度65以上的計算公式=65+控T.Lock感度/1.67
T.LOCK: 0% ./ Normal : 0% 的基準點為 65
T.LOCK >0% 是 65 ->120
Normal >0% 是 65-> 40
譬如 T.LOCK 25% 為 VBar 感度80
譬如 T.LOCK 17% 為 VBar 感度75
譬如 Normal 7% 為 VBar 感度 60
所以今天試機完把感度調到.
Normal : 75% (控 T.LOCK 17%)
ST1 : 71% (控 T.LOCK 10%)
ST2 : 69% (控 T.LOCK 8%)
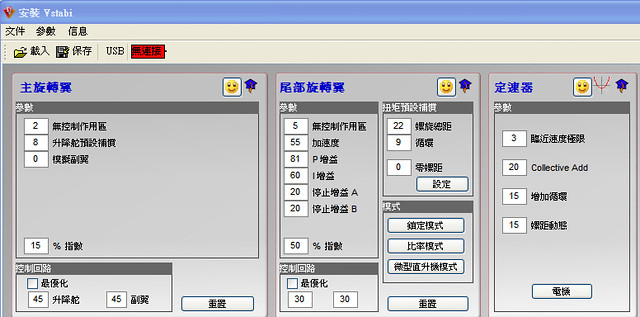
而在集體螺距+-12度上下拉時,在正負P轉換時,尾舵會略向右偏再回來.這問題基本上不在感度.因為調感度是整體比例上的改變.所以我進入尾舵專家模式裡,把尾舵對集體螺距補償(下方照片中的螺旋總距)由 22->25就改善了.

所以目前的 VBar 設定為,
主旋轉翼:
-------------------
風格:80
敏捷度:86
陀螺增益:60
無控制作用區:2
升降舵預設補償:8
模擬副翼:20
指數(EXP): VBar 0%, 控: Normal,ST1/ST2: 0% (原為 20%)
尾部旋轉翼
-----------------------
偏航比率:100
陀螺增益: Normal : 75, ST1:71, ST1:69
無控制作用區:5
加速度:55
P增益:80
I增益:60
停止增益A:23 (原為 20)
停止增益B:23 (原為 20%)
指數(EXP): VBar 0%, 控 : Normal : 40%, ST1,ST2 : 30%
扭矩預設補償:螺旋總距:25, 循環:9, 零螺距:0 (螺旋總距原為 22)
控制回路 30 30
700E DFC
2012/10/17


今天針對 700E DFC 尾感度及在正負12度集體上下拉動作轉換時,尾舵會略為右跑的問題再微調. 同樣是調尾舵在專家模式裡對集體螺距(螺旋總距)的補償.
卡斯特定速飛行
Normal : 1700
ST1 : 1900
ST2 : 2100
螺距曲線 (+-12度)
Normal / ST1 / ST2 : 0-50-100
目前 Vbar 的設定
主旋轉翼:
-------------------
風格:90
敏捷度:86
陀螺增益:86
無控制作用區:2
升降舵預設補償:8
模擬副翼:20
指數(EXP): VBar 0%, (預設15%), 控(XG11) : ELEV/AILE Normal : 30%, ST1/ST2:10%
尾部旋轉翼
-----------------------
偏航比率:100
陀螺增益: Normal : 100, ST1:95, ST1:90 <- 此為VBar 感度, 非控的感度
無控制作用區:5
加速度:55
P增益:80
I增益:60
停止增益A:25 (預設20)
停止增益B:25 (預設20)
指數(EXP): VBar 0% (預設50%)
扭矩預設補償:螺旋總距:26, 循環:9, 零螺距:7 (預設螺旋總距22)
控制回路 35 31 (預設 30 30)
2012年10月7日 星期日
2012年10月4日 星期四
直昇機槳的平衡

如 上圖是用信天翁的槳平衡器做靜平衡, 首先要先配平槳平衡器,放在桌面也不一定完全水平,所以我先用面絲調整到下方氣泡式水平儀的氣泡在中心點,確保槳平衡器的水平.再來上槳. 注意,槳鎖在平衡器上的方向要一致.接下來便看中間下方的指示白點是否對齊了下方的白色圓點.要對齊了才是靜平衡做完.平衡好後,再用手輕輕碰一下槳,讓 它上下晃動,再讓它自然停止,看是否依然停在白色圓點上.而在配平時也要注意,白色圓點範圍有一定,我是以白色指示線中心軸線路白色圓點的圓心對齊才算.
動平衡是調槳的重心.一付好的槳,其重心幾乎不會差很多.可以用主軸滾一下便可找出重心之所在. 如果二支槳重心有偏差,則要稱一下重量,在較輕那支上加貼紙,我個人較喜歡用電氣膠帶,把重心配到一致。如果重心偏移差很多,建議跟店家直接換一付。

靜 平衡則是二邊重量要一致.比較輕的一邊要配重到二邊平衡,而加配重的貼紙則加在槳的重心位置,才不會因加重而改變重心位置.而貼紙要注意是上下要對稱式的 貼在槳的前緣.也就是在照片,你看到的是槳的上方,下方一樣有同樣長度的貼紙.這樣貼在槳的旋轉前進方向才不會脫落.我個人較喜歡用電氣膠帶,可以約略估 算先剪一段黏在槳上,視平衡狀況再裁一點,裁一點,直到二邊完全平衡再完全貼好在槳上.而這付槳是我平衡過最精準的槳,它是 450用的 325槳,只用了一小段電氣膠帶而已^^

靜 平衡則是二邊重量要一致.比較輕的一邊要配重到二邊平衡,而加配重的貼紙則加在槳的重心位置,才不會因加重而改變重心位置.而貼紙要注意是上下要對稱式的 貼在槳的前緣.也就是在照片,你看到的是槳的上方,下方一樣有同樣長度的貼紙.這樣貼在槳的旋轉前進方向才不會脫落.我個人較喜歡用電氣膠帶,可以約略估 算先剪一段黏在槳上,視平衡狀況再裁一點,裁一點,直到二邊完全平衡再完全貼好在槳上.而這付槳是我平衡過最精準的槳,它是 450用的 325槳,只用了一小段電氣膠帶而已^^
訂閱:
文章 (Atom)