馬達金插焊接
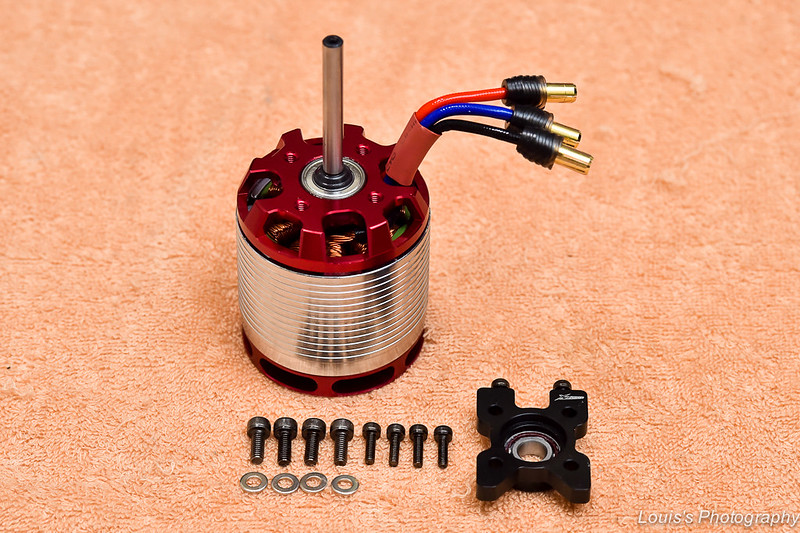
馬達金插要換成習慣使用的 RCPROPLUS REME6808 6mm 散熱型馬達金插。這次的馬達是使用亞拓的 850MX/540KV,搭配原套件 11T 馬達齒,其轉速約為,
540KV x 44.4V x 11T / 106T = 2488 RPM
2488 RPM x 0.9 = 2239 RPM
所以2200 定速時,仍可有足夠的工作空間。不過根據已昇空飛行的飛友分享,XL700機體較輕,在2000 RPM/2100RPM 已相當暴力。而 850MX/540KV 原本已焊有5.5mm金插,所以要先行解焊才能焊上 RCPROPLUS REME6808 散熱型馬達專用金插。

而在焊接前,因為要焊入6mm接頭。如果原馬達線徑較小時,會使用較多的焊錫。而較多的焊錫相對阻抗也較大,在大電流通過時,較易產生高熱而有致使融錫的風險。所以,可以先繞上矽導線至4mm左右再焊入金插。這樣可減少用錫量,相對的阻抗也會較小,阻抗小相對產生的熱也就較低。
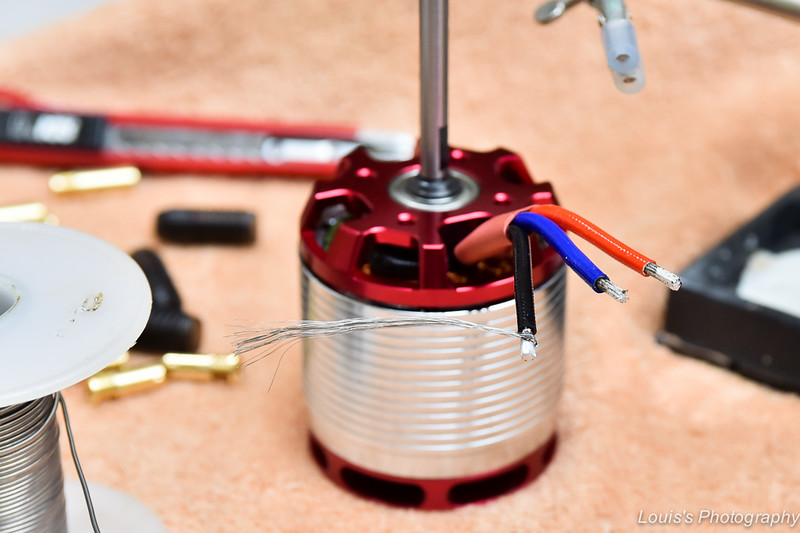
左方的馬達線頭已繞上矽導線,並加點焊錫融入其間隙。
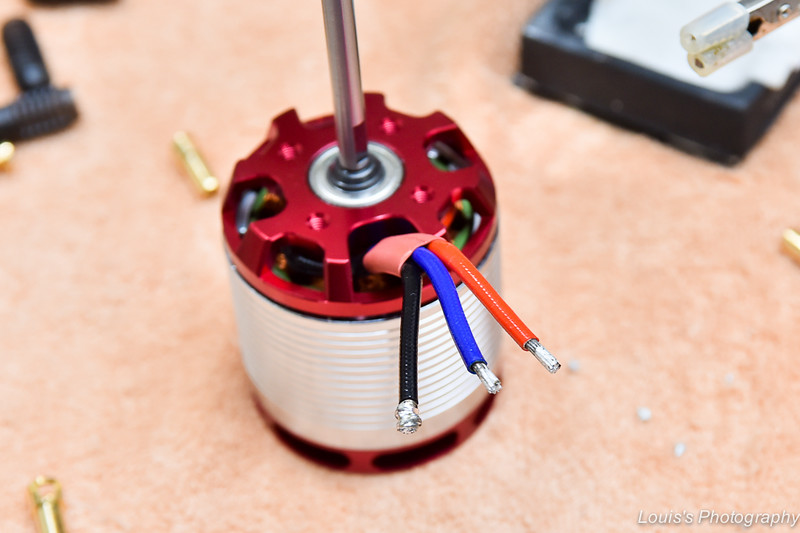
最後再焊上 RCPROPLUS REME6808 6mm 馬達金插,而其他二個馬達線頭同樣也依序加繞焊矽導線後再焊入 6mm 馬達金插。
當然,如要有最低阻抗建議可以使用 RCPROPLUS REM6808 ST Pro,它採用螺絲直接固定鎖附不用到焊錫,其鋁合金接頭阻抗為0.12歐姆。由於這次XL700的好盈200A及 850MX/540KV馬達未來打算跟另一架700級交換測試,所以才採用跟另一架相同的 REME6808 6mm金插連接方式。

電變接頭焊接
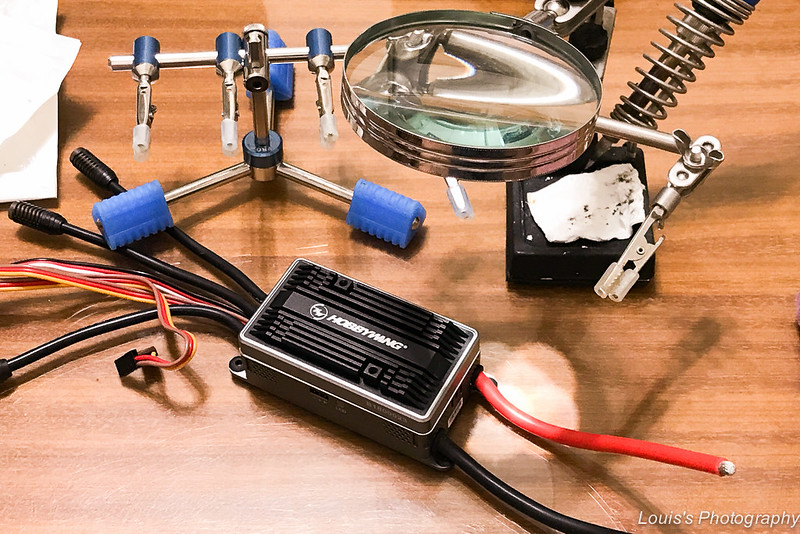
原本XL700一開始電變是要使用好盈160A v4 ,而後來亞拓推出了好盈 200A v4,而且是帶有BEC供電能力的版本 v4.1 @@",而且價錢竟然跟好盈 160A是同樣價格。二話不說,馬上換訂200A。只是謎之音,我這肉腳的飛行技術真的用的到200A嗎? 而且又增加了43公克 XD,其實就是爽度而已。不過,基本上160A應就夠用了^^。

這好盈200A v4.1 除了跟原先的 200A OPTO 多了BEC供電外,跟原先好盈官網販售的200A OPTO在公開規格上也略有不同。而在設定參數上跟好盈130A v4一樣,沒有 PWM 參數可自行設定。
1. 亞拓版電源線徑為 8AWG, 好盈OPTO 為 10AWG.
2. 亞拓版瞬間出力 300A, 好盈OPTO 為. 250A
3. 亞拓版比好盈版重 20克
4. 亞拓版散熱片為一整片條狀, 好盈OPTO為一段一段小段式.

而BEC供電的瞬間出力也提昇至30A,應付大扭力舵機應綽綽有餘,不過最後會在BEC迴路加上 16V / 10000uF 電容穩壓。

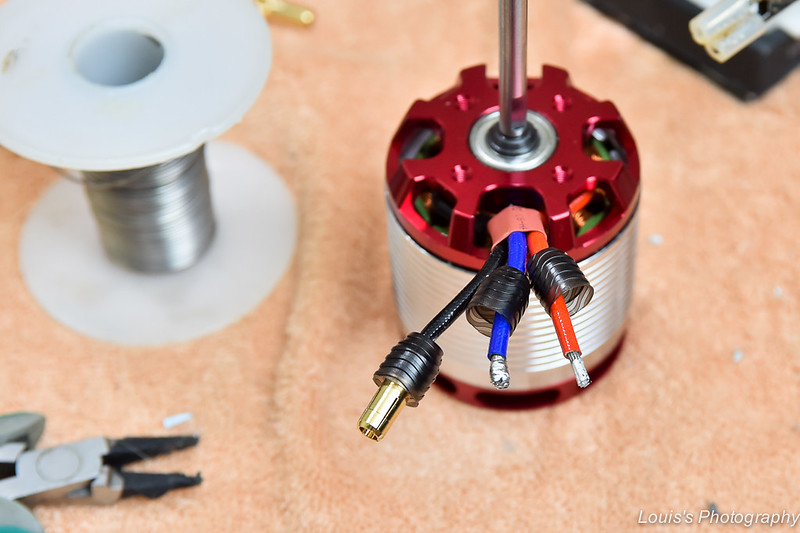
200A的馬達端焊上RCPROPLUS REME6808 6mm金插的母端後,其電力輸入端則焊上六年多來一直使用的RCPROPLUS X6SA接頭,只是年紀大了老花,焊接要放大鏡幫忙 XD。

RCPROPLUS X6SA,金插從早期一開始始的五爪式到現在的四爪式,一直是最愛使用,值得信賴的接頭。

尾拉桿組裝
相關電裝接頭焊接完成後,接下來進行尾拉桿組裝。使用到的零件有金屬正反牙拉桿、拉桿頭及尾拉桿固定環。至於金屬正反牙拉桿在安裝時是正牙或反牙端要朝拉桿頭則沒有規定,端看個人習慣。而拉桿頭二面不同,有數字那面其拉桿頭內徑較小,另一面沒數字其內徑較大,內徑較大這面等下是要朝球頭壓入。而尾拉桿固定環原本在XL520上是選配的改裝件,在XL700上則列為標準配備,用來加強尾拉桿及金屬正反牙拉桿的固定力道。

在把金屬正反牙拉桿旋入尾拉桿前,先把尾拉桿固定環螺絲放鬆穿入。

而金屬正反牙拉桿二端旋入尾拉桿及拉桿頭時,中間露出的部分為15.5mm,大約露出3-4牙左右的長度。

先把拉桿頭旋入金屬正反牙拉桿。
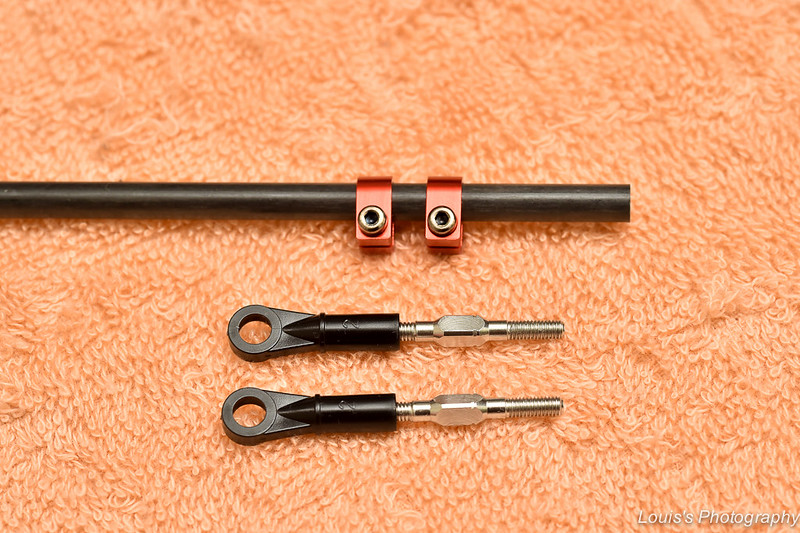
接著正反牙拉桿另一端不用上膠直接旋入尾拉桿,直到中間金屬拉桿露出部分為15.5mm 後,尾拉桿固定環的固定螺絲上膠鎖緊即可。

尾舵安裝
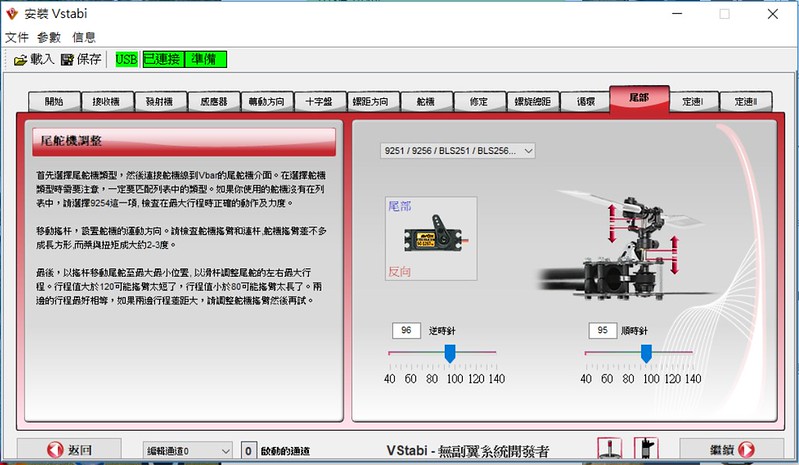
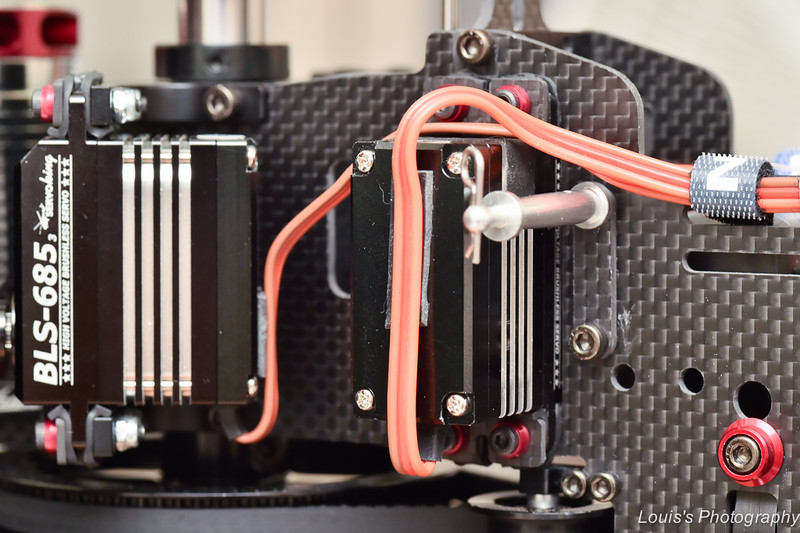
尾舵機這次是使用 ServoKing 697i,它的速度快,定位準。所以在調機時,只要中立點配合適當的預補角,陀螺儀本身的尾舵反扭力補償加道可以減少或其至取消就可以有很好的鎖尾效果。

而舵臂是用ServoKing無段調整舵臂。而XL700尾舵臂長建議在16-18mm之間。所以ServoKing 金屬舵臂有四孔,內一孔為16mm,內二孔為18.5mm。所以把外一孔部分先行裁短。


在上機前調整中立點,並把球頭先放置在內二孔,約18.5mm-19mm左右,這樣理應是較反應快速的孔位。在確認是中立點位置後,這時舵臂保持垂直時先行鎖緊舵臂後上機試調,其VBar左右行程為 75 / 75 。
而在中立點也有約2-3度右旋尾螺距預補角。

雖然75 75 是可以飛行,但以在飛航道時希望能有更細緻的尾舵控制,所以再把尾舵拆下來,球頭使用舵臂內一孔的孔位,其球頭到舵臂固定中心點距離約為16mm左右,同時用量角器確認在中立點時,舵臂保持垂直位置。
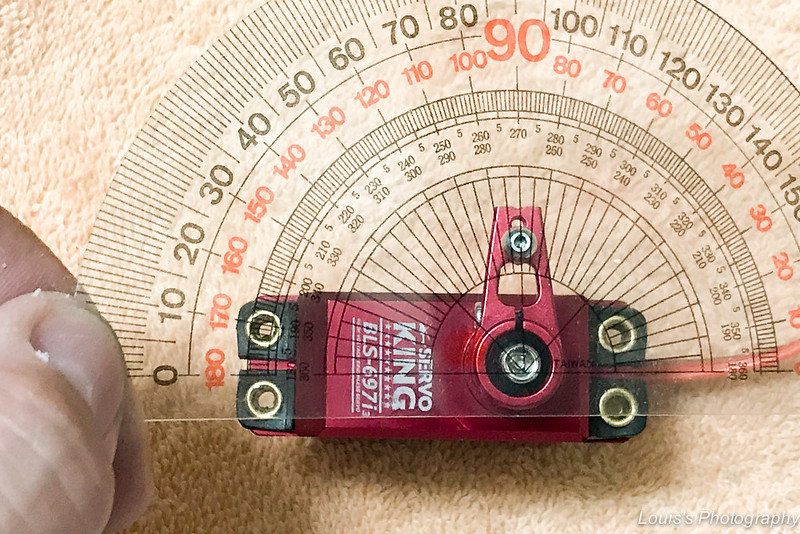
而尾舵行程調出令人相當滿意的 96/95 ,而最後是以 96/96定案。
尾舵機到這裡,其實已安裝上機二次了,到寫文章定稿時已是第三次上機測試。尾舵機安裝是在從機尾往機首看過去的右後方機身,而固定螺絲習慣上加紅色的墊圈。長螺絲套上紅色墊圈後再穿過機身側板後,先套上楔形鋁柱。楔形鋁柱截面積較小的那端朝機身,截面積較大那端朝向舵機。

再把尾舵機安裝上去後,利用固定座鎖定尾舵機。
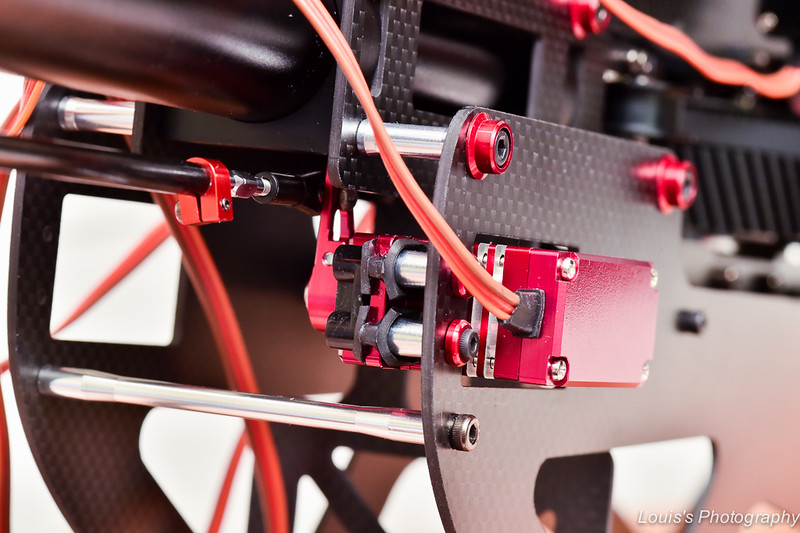

而尾拉桿頭在安裝時,沒有號碼那面再往球頭壓入完成安裝。
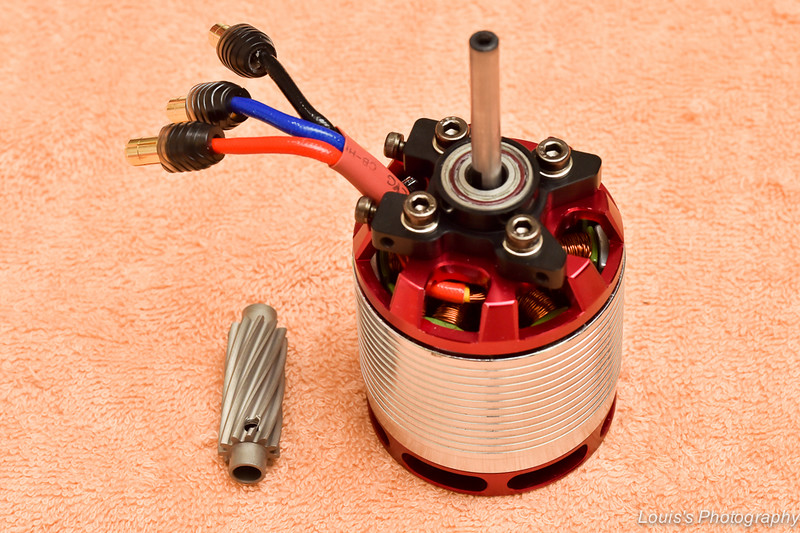
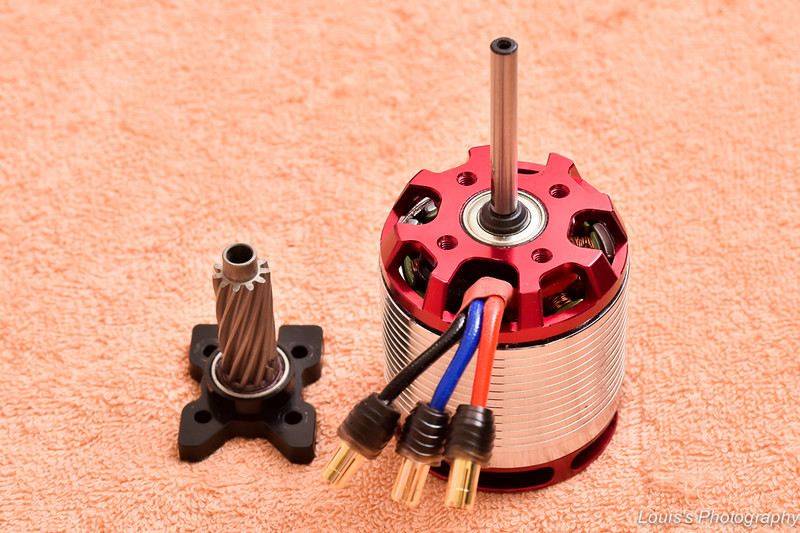
馬達、馬達座和馬達齒座安裝
XL700的馬達齒、馬達座和馬達齒座安裝也相當有巧思。先把原先假組在機身上的馬達座拆下來。四支M3螺絲為固定馬達座螺絲,四支M4螺絲為馬達鎖在馬達座上的螺絲。一開始也打算加上原設計沒有的M4螺絲墊片。
而在這次假組裡也可看到M4螺絲也是芳生螺絲,很讓人放心。而馬達座在設計上特別之處是加了單角列軸承,單角列軸承針對徑向的力道有加強固定之效果。所以這樣一來馬達齒上下都有軸承固定,其穩定度會更好。
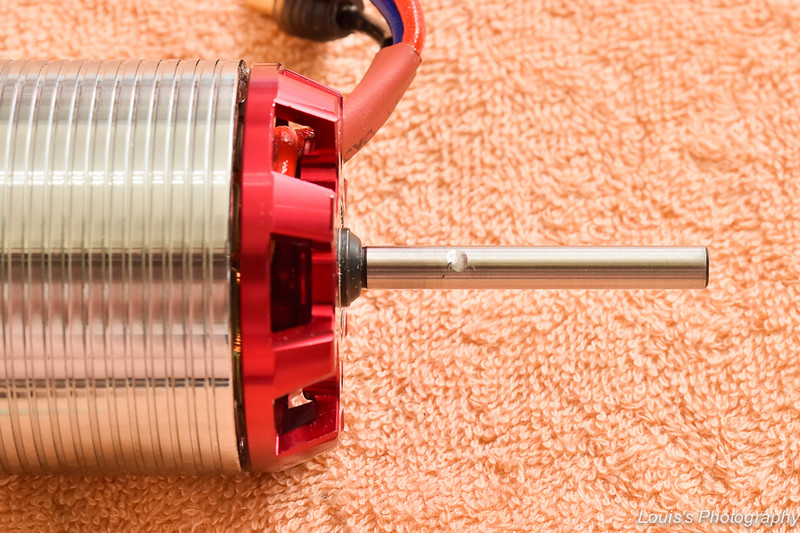
但發現二件事,第一是加了1mm厚墊片,相對螺牙深度吃不夠深。第二是原本馬達軸心上用來固定止附螺絲的止滑平面太低,馬達齒等下止附螺絲無法有效固定在止滑平面。
而XL700的馬達齒設計也是很特別。加長型的馬達齒,這樣一來不管馬達軸心是長軸心,抑或是短軸心都可以安裝使用。這真是同為飛友的設計者才能想到的貼心設計。
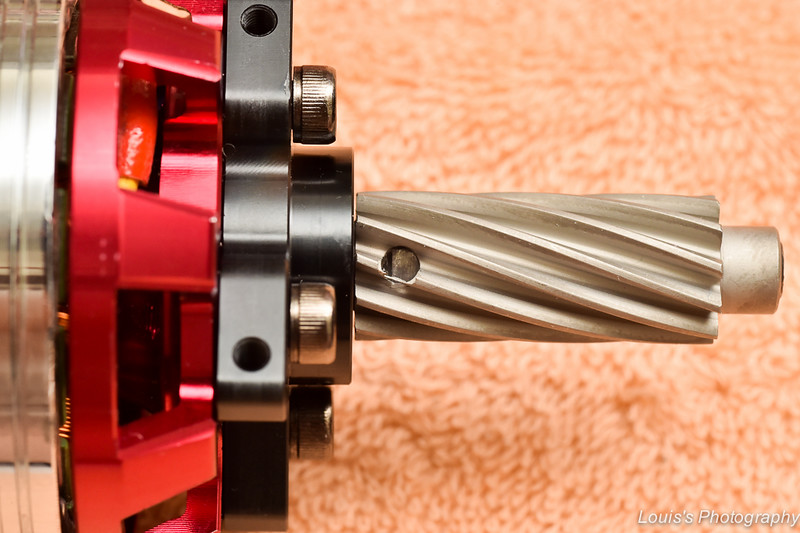
所以用銼刀把軸心上止附螺絲的止滑平面磨平加長,配合馬達齒上止附螺絲孔位的高度。

而馬達齒上的止附螺絲為二顆,採180度對角位置設計。所以在原軸心上止滑平面的對角邊,輕輕用銼刀銼出一個小平面,讓另一個止附螺絲也可穩定定位鎖定。
所以第二次假組時,考量螺絲吃螺牙的深度,所以把原本外加的M4螺絲墊片拿掉了。
同時也確認了銼刀磨出的止滑平面是否可以對齊馬達齒上止附螺絲的孔位,以及再確認M4馬達固定螺絲在固定後是否會有過長而觸及馬達繞線的問題。
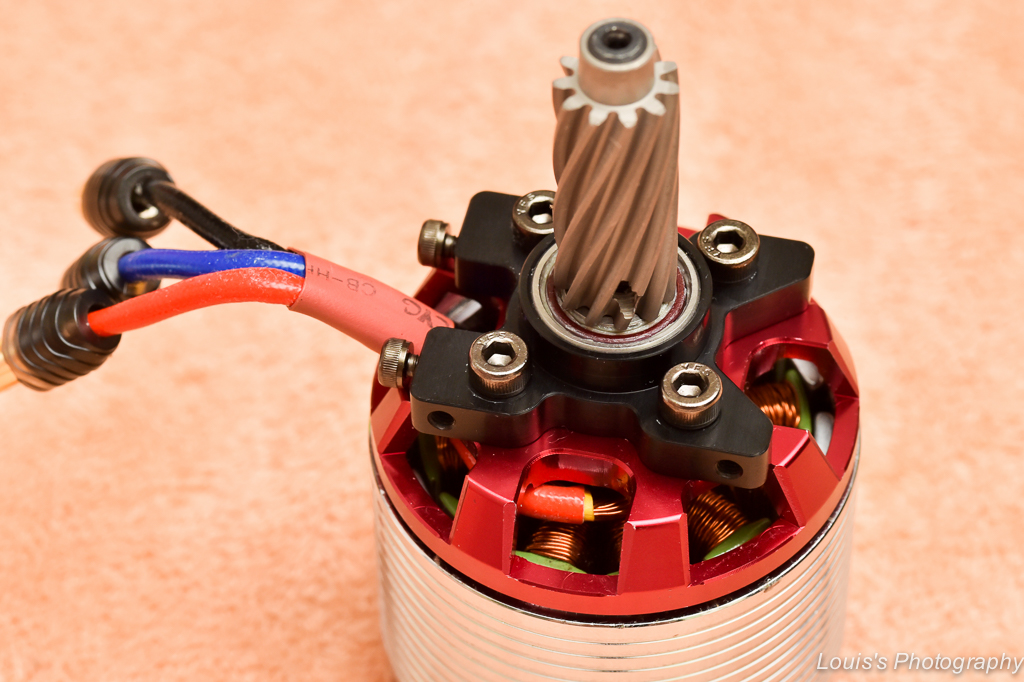
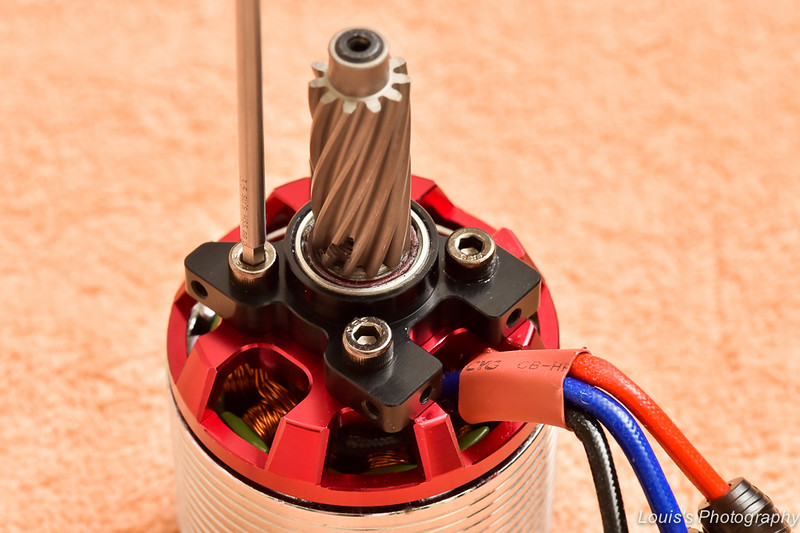
從二次的假組裡發現馬達座的螺絲孔存在著極微小的公差,但會影響到馬達齒安裝至馬達座。如先把馬達鎖上馬達座再安裝馬達齒,可能會因有公差而須用力把馬達齒敲進馬達座裡的單角列軸承,這樣會對馬達座上單角列軸承有一定程度的影響,極可能進而使單角列軸承受損,所以我先把馬達齒安裝至馬達座。
接著馬達座四顆螺絲採交叉方式慢慢鎖緊,這樣可以確保馬達齒是在最滑順的位置安裝入單角列軸承,而使單角列軸承的徑向受力平均。
而馬達齒的止附螺絲也不能硬鎖,因為一開始的螺牙只吃在馬達齒的尖端,如果沒有完全垂直鎖入而斜了一點, 一定無法滑順鎖入。所以如果在鎖止附螺絲時無法滑順鎖入時,一定角度不對。要再退出來後,微調一下角度。直到可以滑順鎖入為止。

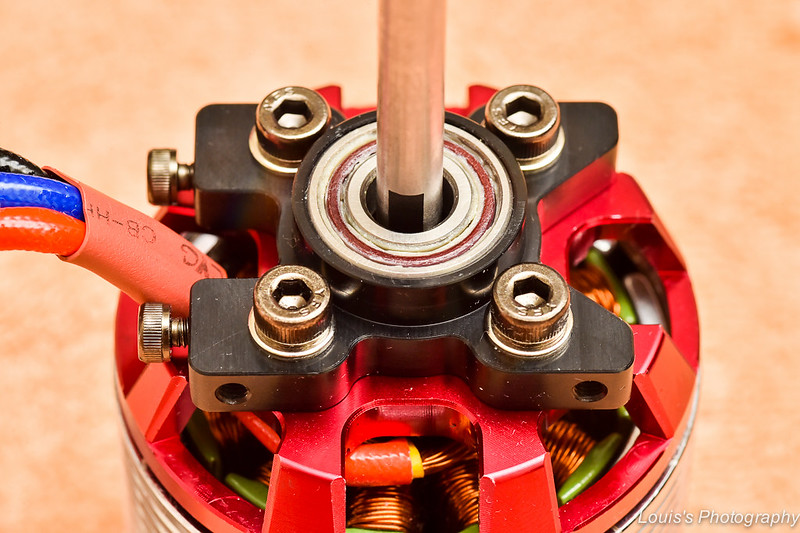
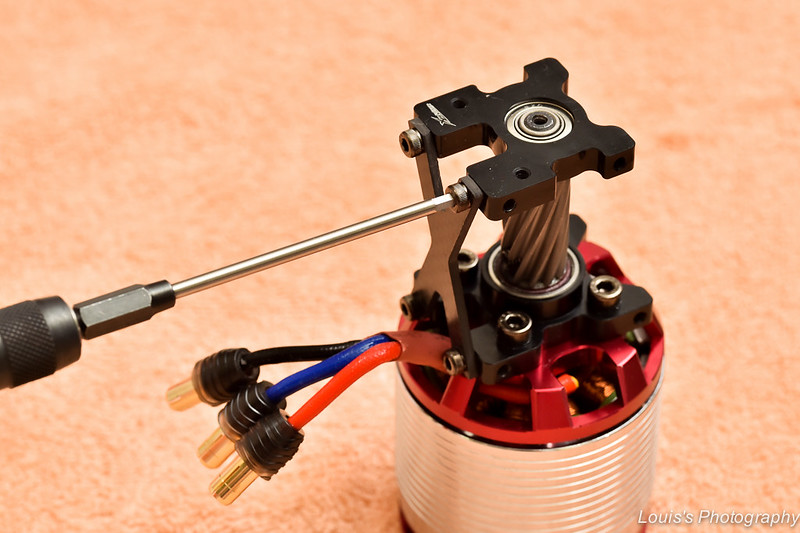
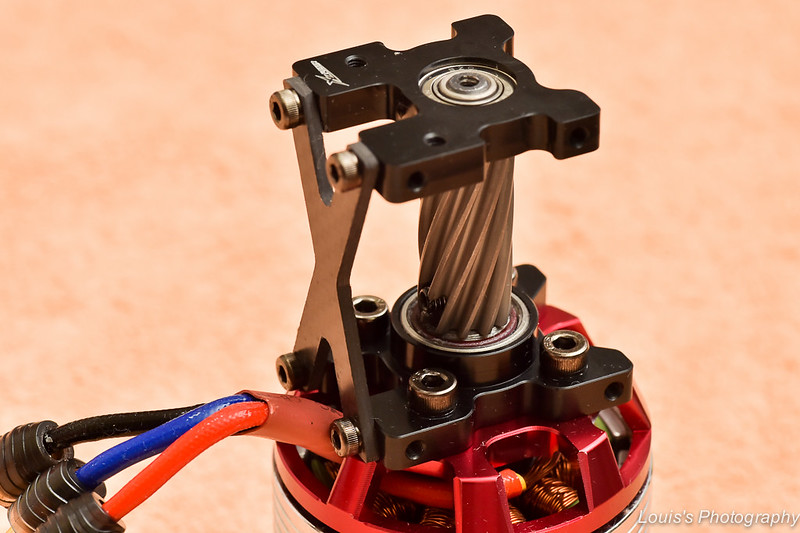
而馬達齒座在鎖時也要注意軸承的方向性。馬達齒座上有XLPower的字樣要朝馬達齒的另一面,如照片中所示。同時馬達座跟馬達齒座亦設計了垂直加強固定片,提高其穩定度。
這馬達座、馬達齒、馬達齒座和加強固定片的設計真是太有才了,宛如藝術品般又提高了動力傳動穩定度。
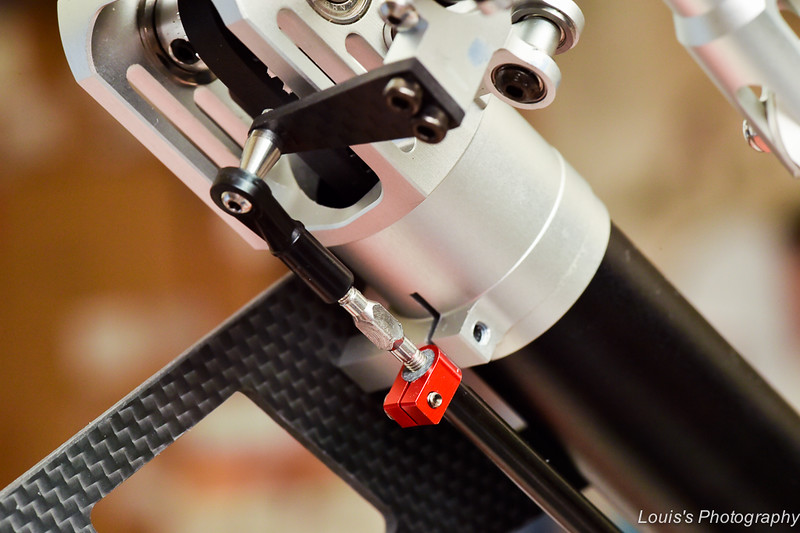
接著再假組上機身,測試馬達座及馬達齒座鎖在機身上時,機身側板固定螺絲有沒有任何要用點力才能鎖入的狀況,所以照片所示,只鎖了馬達座及馬達齒座對角的螺絲進行滑順度測試。在確認所有螺絲都很滑順鎖入後才拆開馬達座、馬達齒座和加強固定片上螺絲膠,馬達齒的止附螺絲則上R48螺絲膠,而固定在機身的側向螺絲先不用上膠。
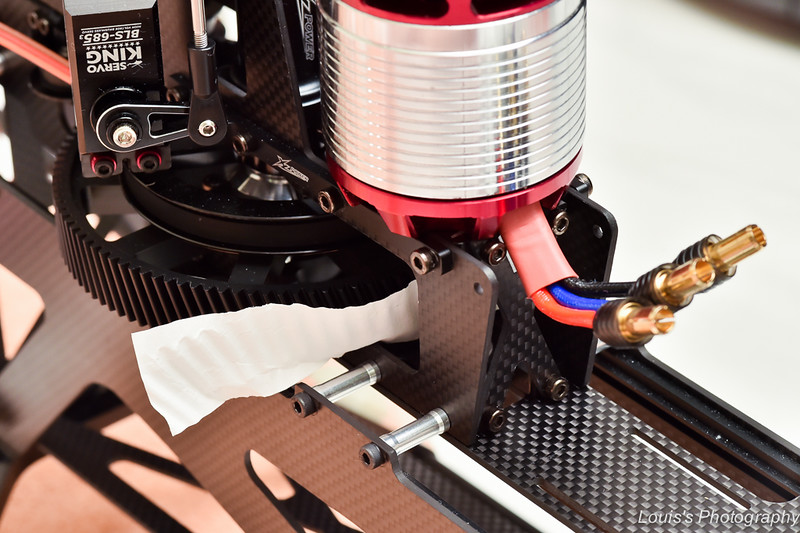
再利用80磅左右的A4紙張調整馬達齒隙,輕推馬達座總成,靠上主齒後,以A4紙的厚度為其間隙調整依據。接著再以交叉方式左右交互慢慢把馬達座及馬達齒座共八顆螺絲慢慢鎖緊後,接下來慢轉動主齒,一齒一齒確認齒隙都正常。主齒的真圓度也相當有水準,所有各齒的齒隙間隙大小都一致。在確認齒隙間隙大小都一致後,馬達座及馬達齒座側板固定螺絲一次拆一顆下來上膠再重新鎖緊。
最後不要忘了,馬達齒座下方跟電池固定滑軌座還有二支M3半圓頭螺絲要上膠固定。而要試機則建議至少要過24小時,讓R48, T43螺絲膠全固化再行試機。

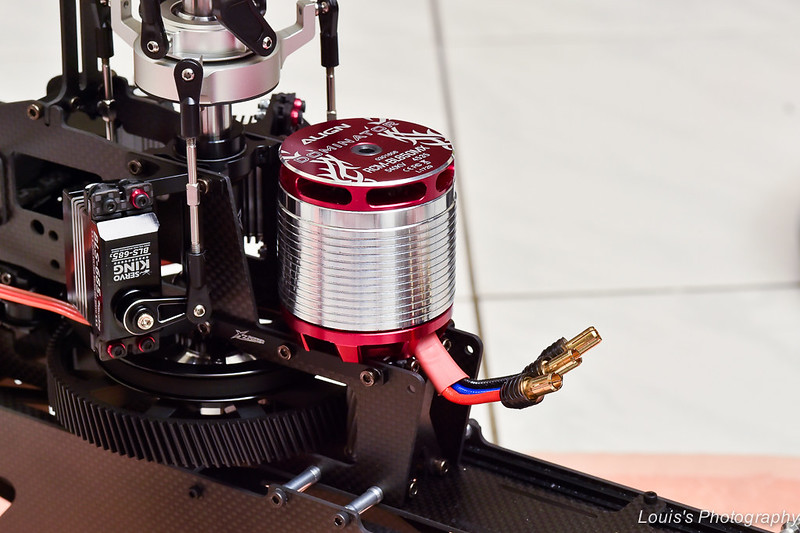
到這裡就完成馬達的安裝,紅色的850MX/540KV跟黑色的機身,和同為黑色系的ServoKing舵機好搭啊,真是太好看了。
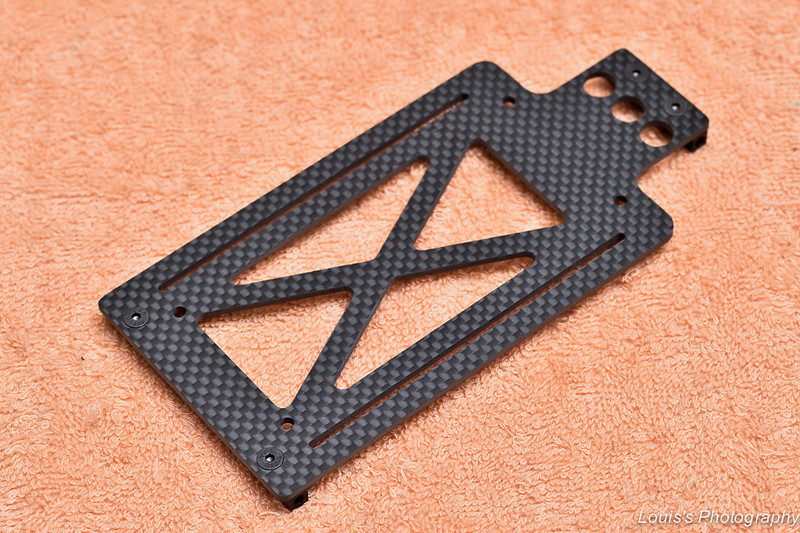
電變座安裝
電變座有前後固定座,靠機首的固定座較長,而尾端固定座較短。
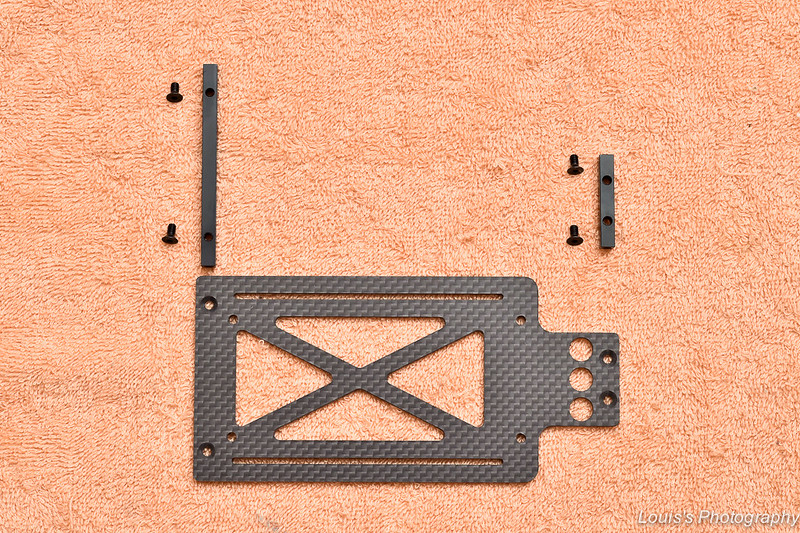
二個固定座固定好後,就可準備上機。而在電變固定座上四個角落的M3孔位剛好可以用來固定好盈160A或200A電變,這真是太貼心了。而尾端上三個孔位,原本設計是要讓三條馬達線穿過,但個人覺易磨損電線外絕緣層,所以打算側走。
而用來固定電變固定座的皿頭螺絲,也是用芳生12.9高強度螺絲。

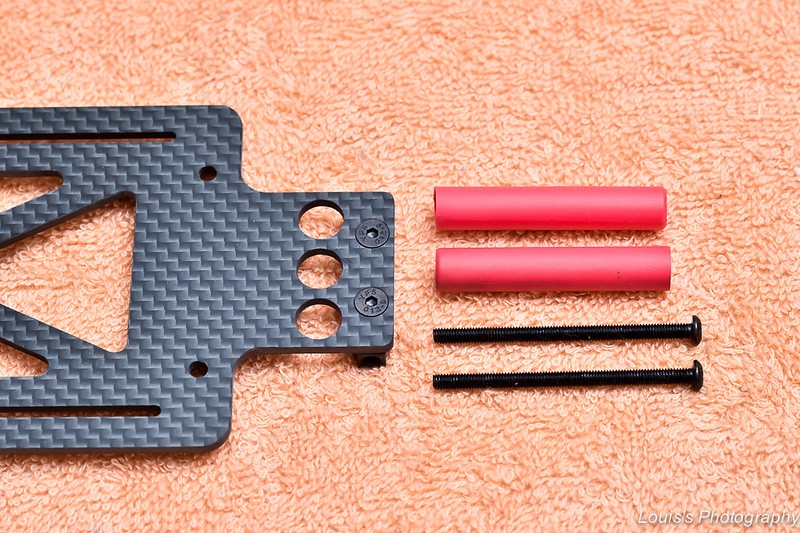
而後端固定座,會再加上M3x45mm螺絲配合固定柱來頂住機罩。而個人較喜歡紅色,所以先在白色固定柱外加上紅色熱縮套。
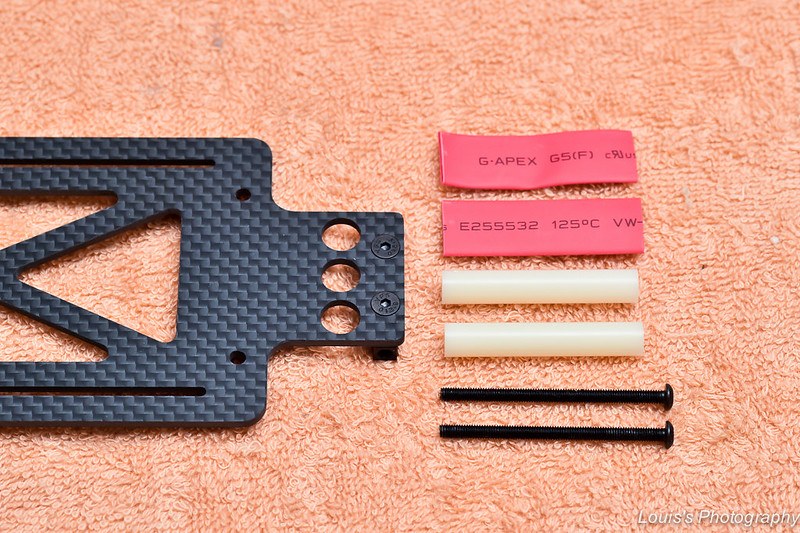
熱縮套用熱風槍,約用400度左右對其加熱而使其收縮後,準備安裝上機。
其前後螺絲先不用上膠,因為電變尚未決定安裝的方式。
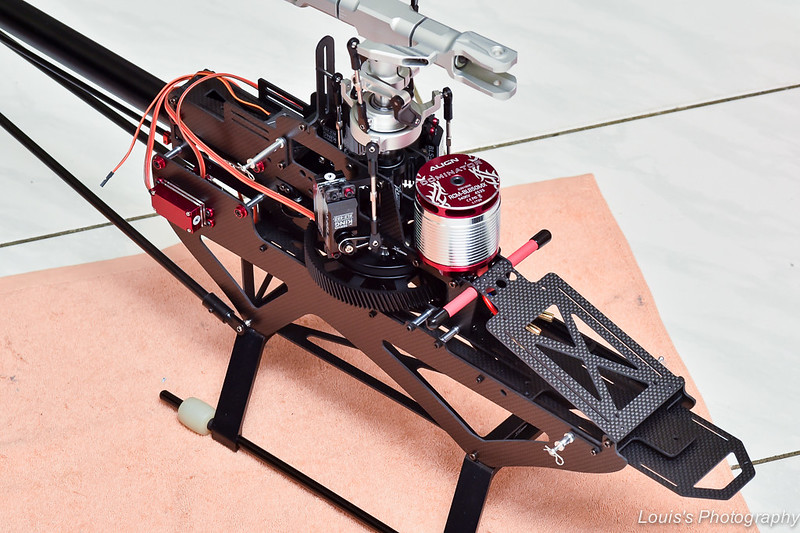
電變先試著擺上去,不過正式安裝打算電變用M3螺絲+M3止滑固定在電變座上的方式。
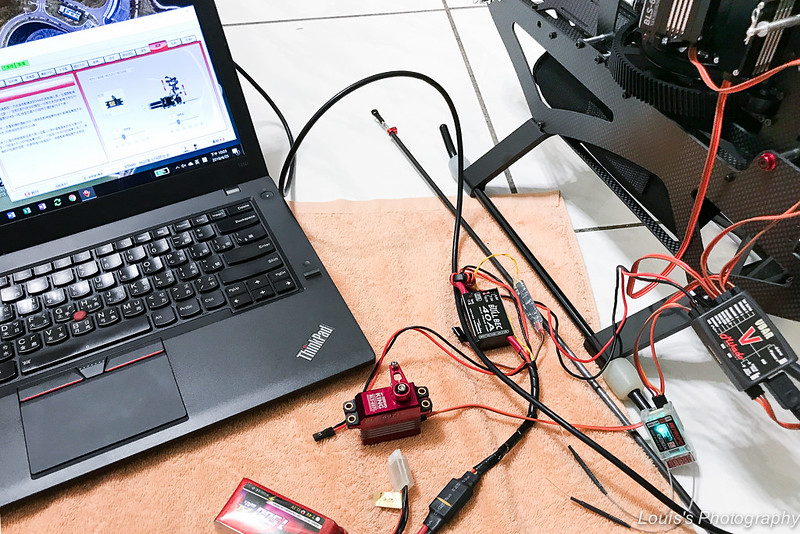
電裝走線/布綫
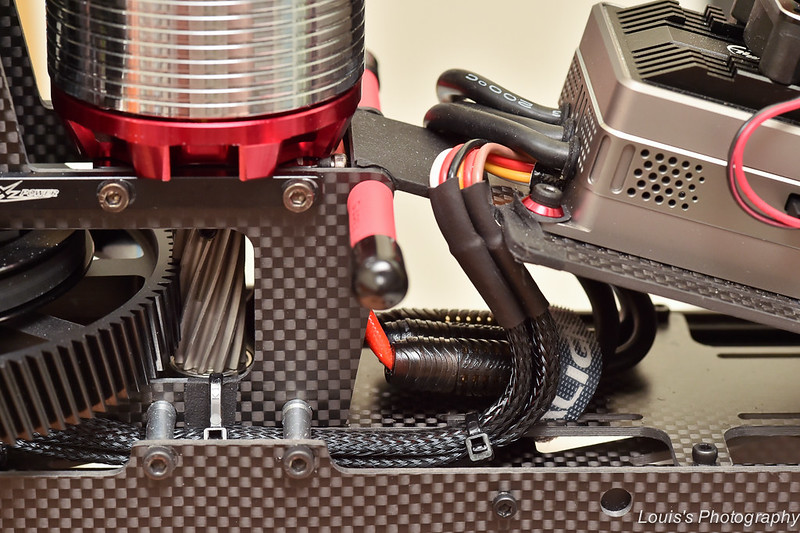
走線部分未必是最好的方式,只能分享個人的走法。因為用來保護舵機訊號線防磨的蛇皮管訂購了尚未到,所以先做電變油門訊號線及第二BEC供電線的試走。本打算沿著馬達座下方穿過三號舵機下方走到後方。但馬達座在運轉的高溫及磁場切割效應應會影響到訊號穩定度,所以改走機身中段,也就是走主齒盤下方的方式。
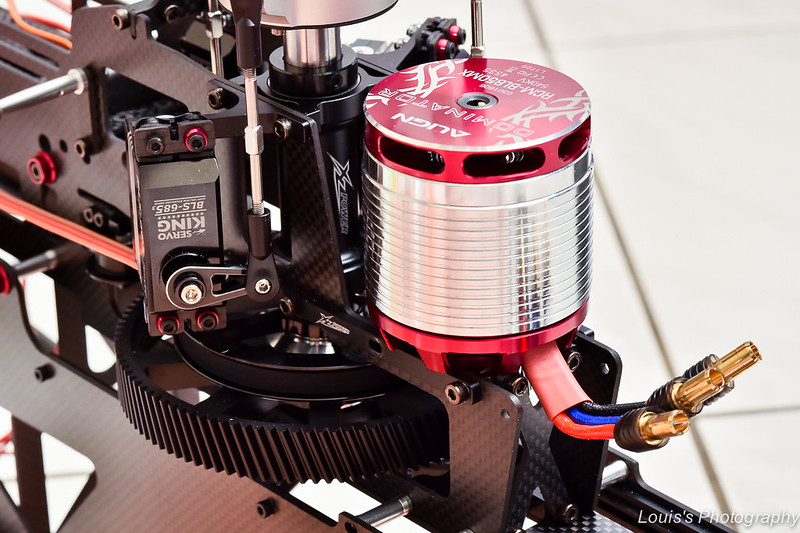
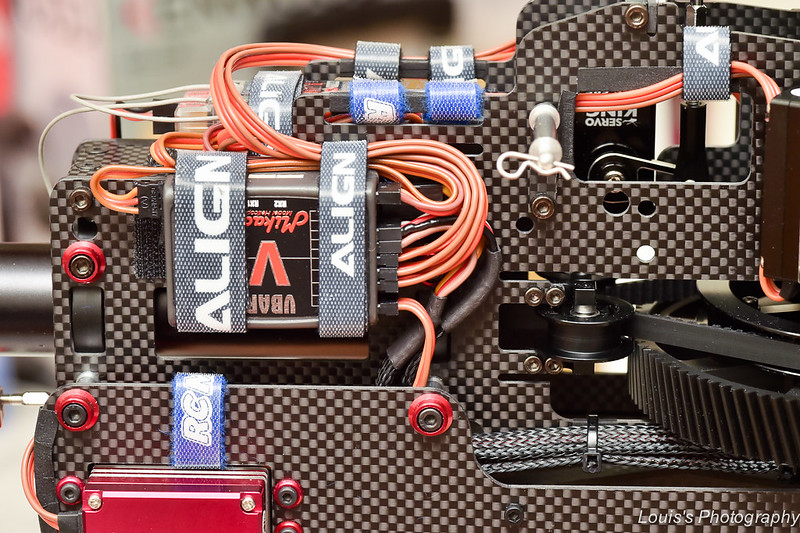
不過,至少可以先確認的是馬達訊號線的安裝。其電變安裝的方向決定是馬達訊號端朝後,因為這樣油門訊號線可以有較長的空間可以走中段到機尾,另外電力輸入端朝前也可以較方便接上動力電池。而馬達端會經過的電變座邊緣,利用攝影器材上常用的防磨膠帶包覆。這種膠帶耐高溫,不留殘膠,很好用。而之前也提到電變座上的四個M3孔位剛好是用來固定好盈200A電變,所以照片中是用M3x10圓頭螺絲搭紅色墊圈配合M3止滑螺帽來固定。
而靠電力輸入端的電變座也用防磨膠帶包覆。

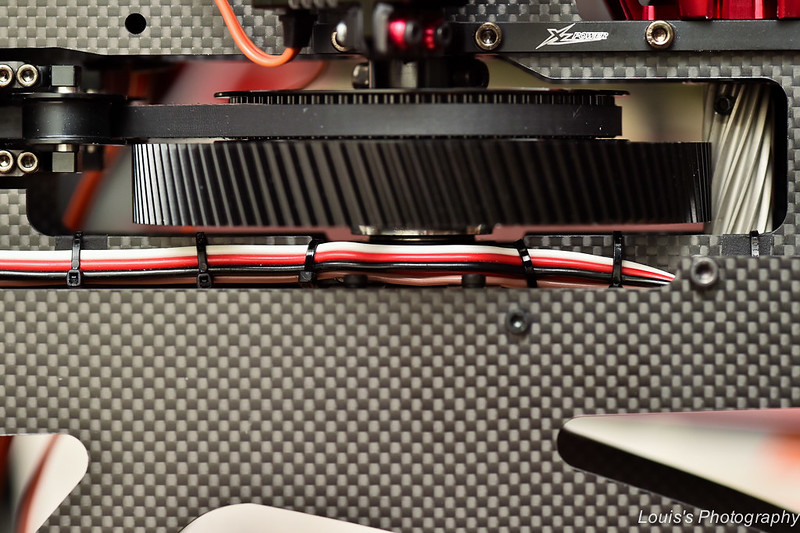
而馬達端金插先往下走,利用電池滑軌座上的固定孔位來加上魔鬼束帶固定好後再把電變座鎖上,這等於是走在電變座的下方。
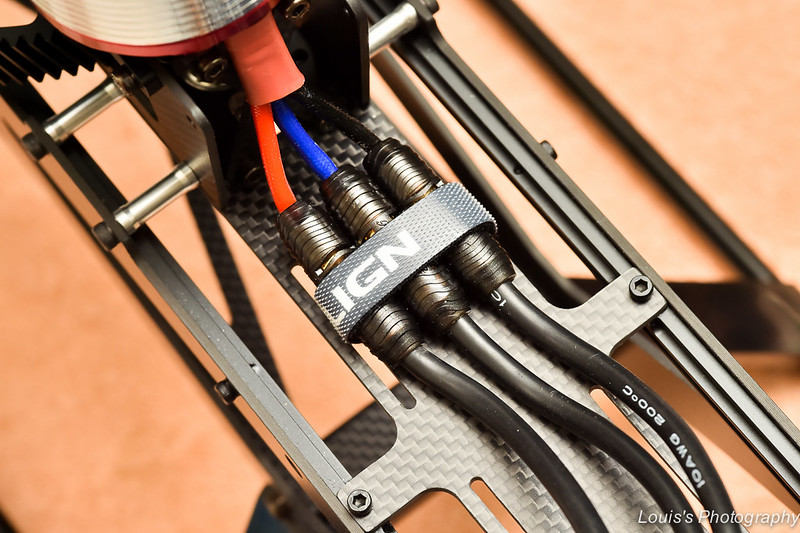
從機首往機尾的方向看過去,200A電變的馬達端三條電力線往電變座的右上方空間往下走,再接上馬達金插。

而往下走的三條馬達線也利用魔鬼速帶在中段的地方再加以固定。

而油門訊號線等下要固定的地方都先用防磨膠帶包覆。

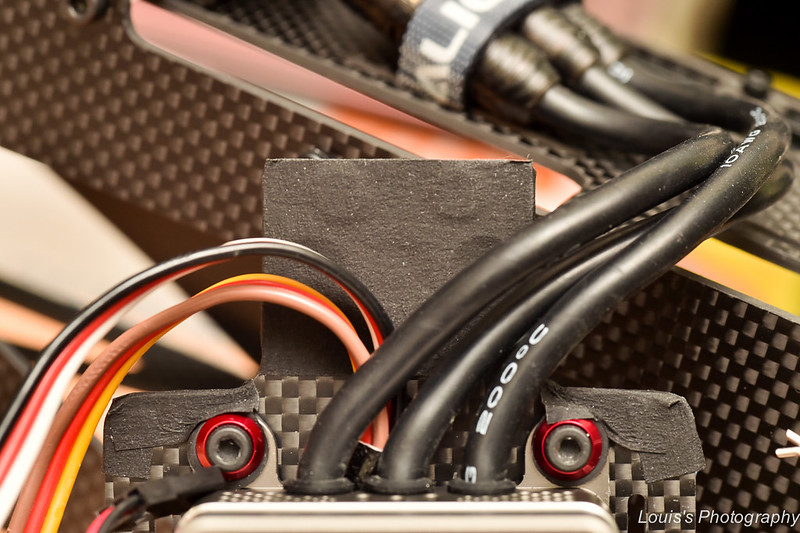
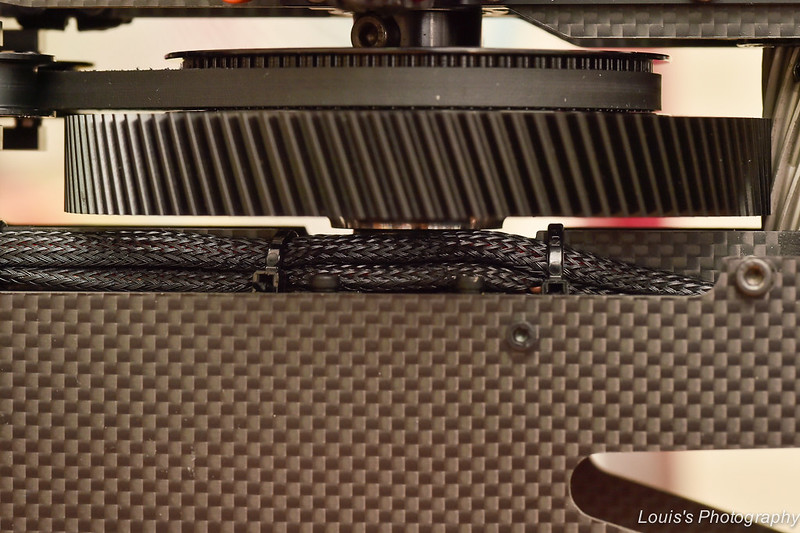
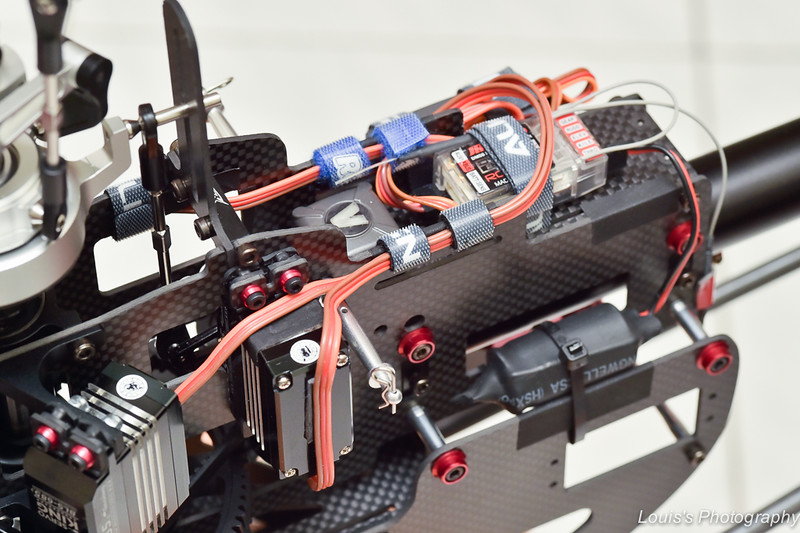
所以電變的油門線及第二BEC供電線由電變的馬達端出來後往下走到電池滑軌座上方再沿者機身往機尾走。
接著沿著主齒下方的機身中段空間往機尾走。
最後由尾舵附近機身再往上走,接上大銀V控制盒。不過,到這裡尚未測試大銀V是否會被機罩罩上時干涉到,這部分如會干涉到時再來調整。
後來訂購的蛇皮管到了,重新再走一次從電變的油門訊號及第二BEC電源供應線。
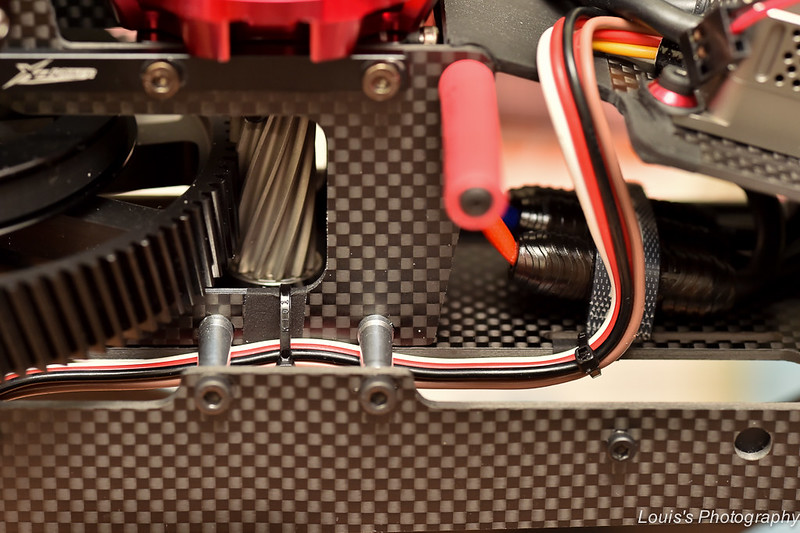
按著之前走的方式,走過主齒盤下方再往後走。
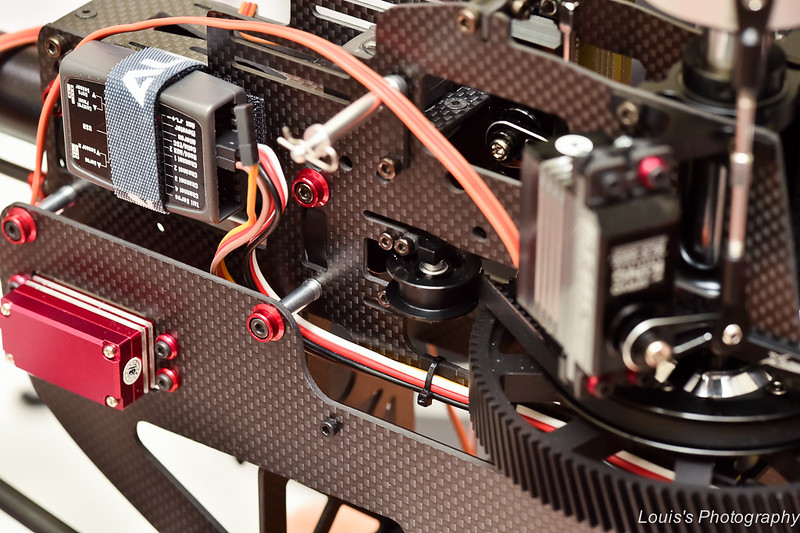
因為此次陀螺儀是用 VBar Sliverline,所以有控制盒及感測器。因為控制盒寛度比陀螺儀固定座寛,加上考量電變油門訊號線不想再加延長線,所以把控制盒側掛在機尾側邊。而油門訊號線走過來則直接接上控制盒。
而二號舵機較一號舵機更前方,這樣在往後走線時,會比一號舵機訊號線更短,而使二條線不好收尾。所以二號舵機訊號線為了爭取長度而斜上至一號舵機再一起往後走線。二條訊號線都先用3M VHB固定在舵機底部後,再往上走線。
一, 二號舵機再一起收尾繞一圈接上控制盒。而沿線會跟側板有接觸的點都包上防磨膠帶。而接收是採用JR 613BX XBUS 接收,略為小型。剛好跟Vbar感測器一起安裝在陀螺儀固定座上。
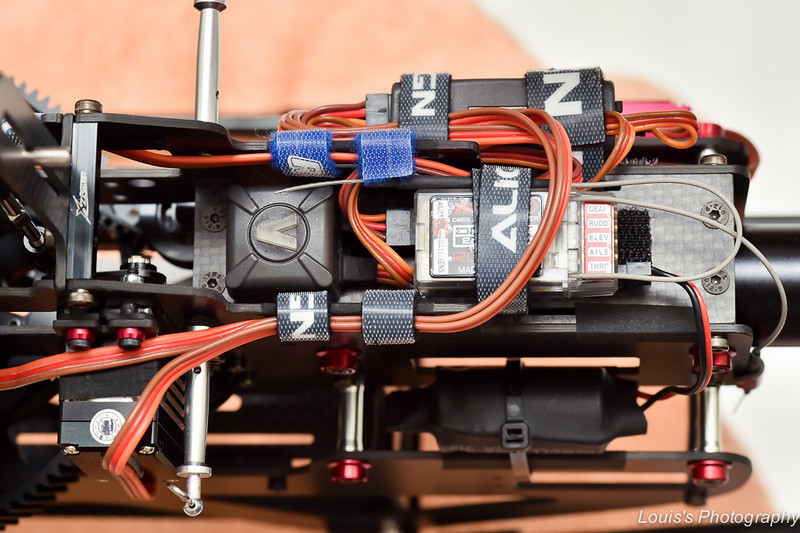
而為了吸收大扭力舵機在運行中產生的逆電流,採用了 16V15000uF電容,剛好安放在上下側板中間的空間。而未來電容上方的側板空間則是要側掛天蠍星BEC備用電源。到這裡走線/布綫算是告一段落。雖不滿意,待試機完後有時間再重新走。
機罩固定墊圈安裝
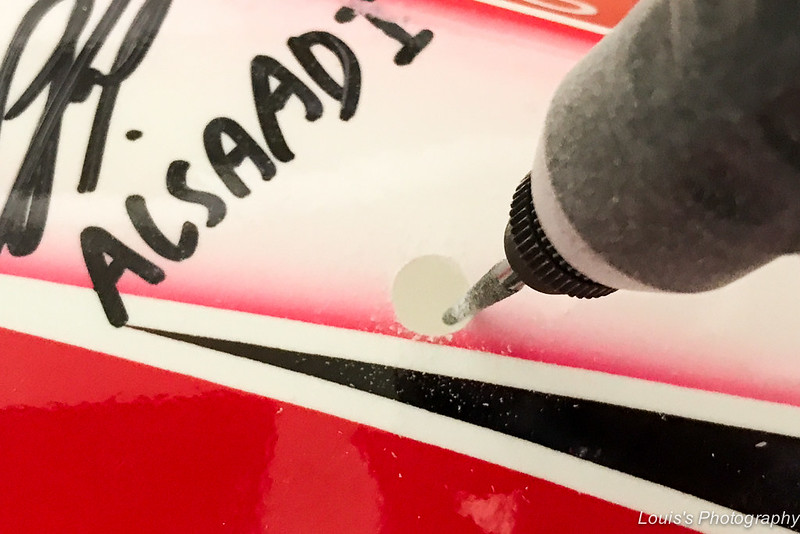
剛好有緣拿到上面有油王以及XL Power首席廠機手 Kan的簽名機罩,但上方並未開孔。所以再用小型電鑽進行開孔的作業。
接下來再用CA膠黏好機罩墊圈固定環。

最後裝上墊圈。

因為在之前已完成了舵機中立點校正,十字盤水平校正和尾行程校正。接下來一一把 VBar基本調機應完成的校正工作做好,完成基本調機,而飛行參數則按之前習慣設定.
VBar
風格: 85
滾轉率: 100
主旋翼感度: 100
尾偏航感度: 100
指數部分歸零,改由控設定。
再完成好盈200A電變油門校正後,裝上電池, 天蠍星BEC備用電源和機罩進行飛行重心調校後,再拆主尾槳進行地面試機。油門85%摸尾管沒有震動。再安裝尾槳後再進行地面試機至油門85%,也無震動。到此全機完成,擇日進行昇空試機。先來拍幾張全機照,家裡有點亂不好意思^^。

這次為了搭配紅黑色的機罩,主槳選用手上珍藏的 Spin Blade 700 Matt RED 紅武士。

換個角度,XL700真是美啊!

期待昇空試機,屆時再跟大家分享。

延伸閱讀:
[大年初五開工] XLPower SPECTER XL700 裝機前準備事項
XLPower XL700 -機身組裝篇(圖多請耐心等載入...)
XLPower XL700 - 主軸相關動力傳動總成件組裝篇
XLPower XL700 尾管總成組裝篇
XLPower XL700 大部組機與CCPM舵機安裝
XLPower XL700 尾舵、馬達/電機、電變/電調的安裝及走線/布綫
XLPower XL700 試機
沒有留言:
張貼留言